


Módulo de IA 5s Whalesbot
 Edad +8 años
Edad +8 años
| Gama: LEGO Education |
| Tramo Educativo: Primaria, Primaria 8-9 años, Primaria 10-11 años, Secundaria, Secundaria 12-13 años, Secundaria 14-15 años |
| Individual/aula: Pack individual |
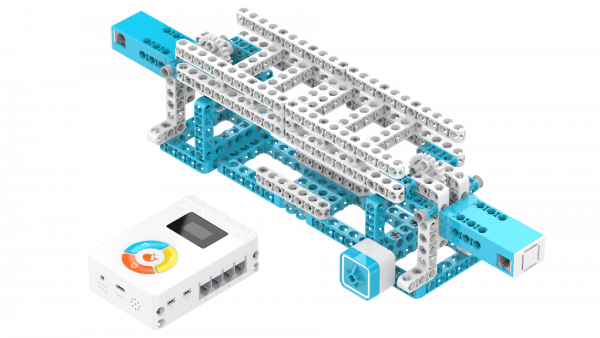
Este kit destaca por ofrecer una transición impecable entre la robótica educativa y los conceptos reales de la ingeniería industrial, combinando un hardware robusto con un entorno de software multilinguaje.
Controlador Inteligente:
Alto Rendimiento: Frecuencia de reloj de 240 MHz, con 4 MB de memoria flash y 224 KB de RAM (capaz de almacenar localmente más de 30 programas).
Interfaz de Usuario: Pantalla LCD integrada de 128×64 píxeles, 4 botones físicos programables y altavoz integrado.
Conectividad: Bluetooth integrado y 16 puertos de entrada/salida para una versatilidad de conexiones masiva.
Modos de Trabajo: Soporta modo de descarga por USB y modo de ejecución en línea (online running mode).
Ingeniería Mecánica Avanzada:
A diferencia de los kits tradicionales, este modelo incluye más de 315 piezas estructurales (de 37 tipos diferentes)enfocadas en la transmisión física:
Sistemas de Engranajes: Ruedas dentadas de 8, 16 y 24 dientes, engranajes cónicos y engranajes helicoidales.
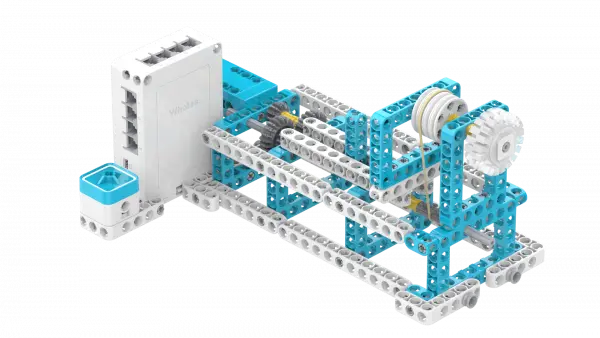
Mecanismos Industriales: Incluye cremalleras para convertir el movimiento rotativo en lineal, permitiendo construir pinzas de agarre y elevadores realistas.
Chasis Integrado: Una estructura base ultrarresistente y estable optimizada para transformarse rápidamente en vehículos robóticos de competición.
Sensores y Actuadores de Alta Precisión:
Navegación Óptica: Equipado con 5 sensores individuales de escala de grises, ideales para algoritmos complejos de rastreo y lectura de pistas de competición.
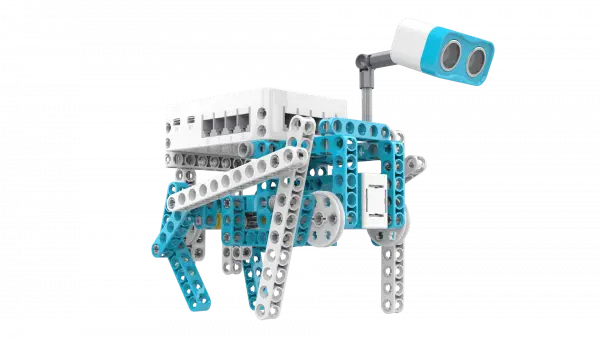
Detección de Entorno: Incluye un sensor de obstáculos por infrarrojos y un sensor de reconocimiento de color.
Movimiento Profesional: 3 Motores de bucle cerrado (closed-loop) que miden su propia rotación para garantizar trayectorias perfectas y corregir desvíos.
Feedback: Módulo de luz de color RGB.
Especificaciones:
Alimentación: Batería de litio especial de 7,4 V y 1500 mAh (diseñada para soportar largas sesiones de pruebas en el aula sin interrupciones).
Entorno de Programación: Compatible con Scratch (bloques), C (textual), Python (profesional) y un editor de acciones intuitivo.
Valores Educativos:
Pensamiento Computacional Avanzado y Lógica Multicondición: Al programar con múltiples sensores en tiempo real (como el array de 5 sensores de escala de grises), el alumnado deja atrás las instrucciones lineales simples para adentrarse en la lógica condicional avanzada. Aprenden a estructurar algoritmos complejos donde el robot debe tomar decisiones combinando variables simultáneas (velocidad, color, obstáculos y posición).
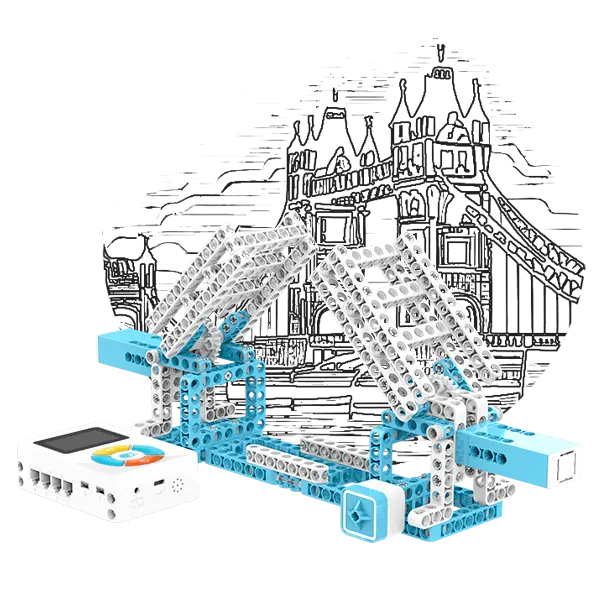
Ingeniería Mecánica y Cinemática Aplicada: Con el sistema de transmisión avanzado (engranajes cónicos, helicoidales y cremalleras), los alumnos/as asimilan conceptos físicos y mecánicos reales. Aprenden en la práctica cómo transformar un movimiento rotatorio en uno lineal, cómo calcular relaciones de transmisión, y la diferencia crítica entre fuerza (torque) y velocidad.
Precisión y Gestión de Datos en Tiempo Real: El uso de motores de bucle cerrado (closed-loop) introduce al alumnado en el concepto industrial de sistemas de control por retroalimentación. Aprenden a interpretar los datos que el propio robot genera para corregir errores sobre la marcha, una habilidad fundamental en la ingeniería moderna y la ciencia de datos.
Transición Gradual al Código Profesional: El entorno de software de WhalesBot actúa como un puente pedagógico perfecto. Permite que el alumno comience estructurando sus ideas de forma visual con Scratch y evolucione de manera natural hacia la sintaxis real y el código de texto con Python y C, preparándolos para entornos académicos y laborales reales.
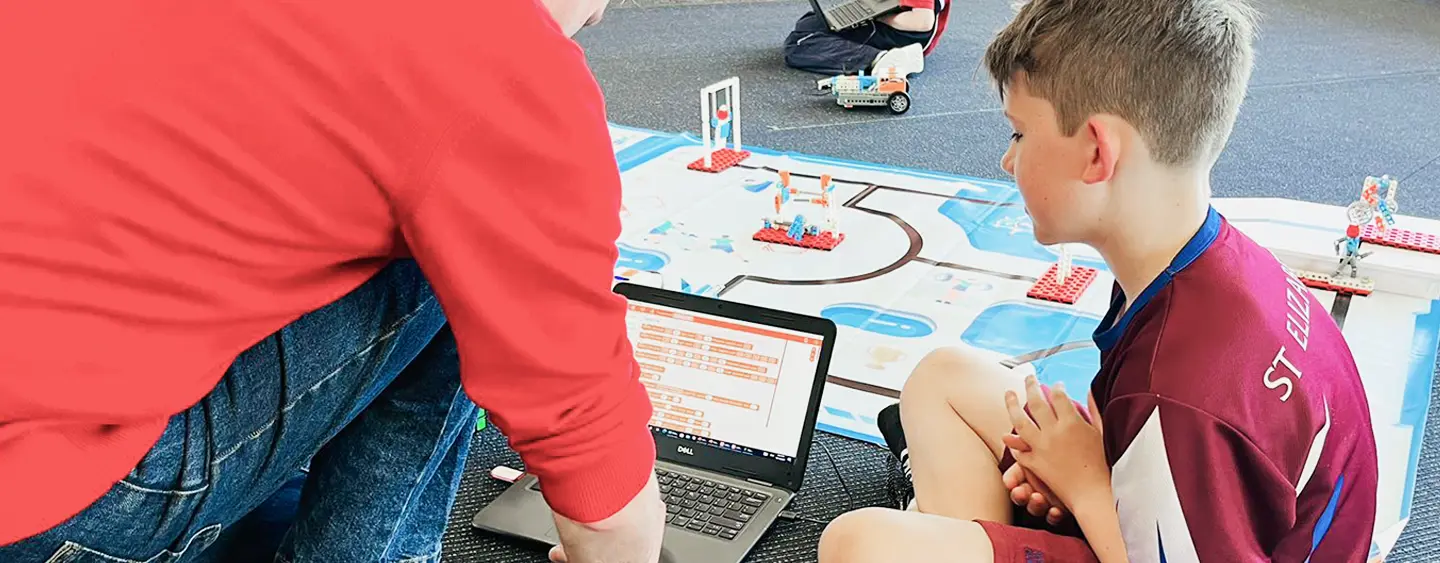
Resolución de Problemas y Resiliencia en Competición: Diseñado con el estándar de torneos como ENJOY AI, este kit fomenta el pensamiento divergente y el trabajo en equipo bajo escenarios de desafío. Los y las estudiantes aprenden a iterar, probar, fallar y recalibrar sus modelos de forma autónoma, fortaleciendo la confianza en sus propias habilidades técnicas.
1 Controlador
1 Sensor ultrasónico
1 Sensor de color
1 Sensor de temperatura y humedad
1 Codificador rotatorio
1 Sensor de gestos
1 Sensor táctil
5 Sensores de escala de grises para el suelo
2 Pantallas de matriz de puntos
2 Luces LED RGB
4 Motores de circuito cerrado
13 Cables de conexión de 6 pines
1 Cable de datos Tipo C
1 Batería
1 Adaptador de corriente
Componentes Estructurales
Engranajes, Mecanismos y Ruedas
4 Engranajes de 8 dientes rectos
4 Engranajes de 16 dientes rectos
4 Engranajes de 24 dientes rectos
8 Engranajes cónicos de 12 dientes de media altura
4 Engranajes cónicos de 20 dientes de media altura
4 Engranajes de cono de 12 dientes
4 Engranajes de cono de 20 dientes
2 Engranajes de cono de 36 dientes
8 Cremalleras con agujeros para vigas
2 Engranajes helicoidales / Sinfín
2 Neumáticos tipo 6018
1 Rueda universal / Loca
4 Bujes / Ejes de transmisión
4 Neumáticos de tracción
4 Ruedas de cadena
60 Orugas / Eslabones de cadena
4 Neumáticos para polea
4 Poleas
Ejes, Conectores y Soporte
20 Manguitos para semiejes de polea de 0.5
10 Manguitos para ejes
3 Soportes de transferencia para motor
1 Chasis general
5 Ejes de tamaño 30
5 Ejes de tamaño 40
6 Ejes de tamaño 50
4 Ejes de tamaño 60
8 Ejes de tamaño 80
2 Ejes de tamaño 100
2 Acoplamientos universales / Cardán
4 Acopladores de 20
4 Acopladores de 90°
3 Acopladores de 112.5°
3 Acopladores de 157.5°
Vigas Estructurales
4 Vigas en forma de U
8 Vigas de tamaño 20
18 Vigas de tamaño 30
15 Vigas de tamaño 50
13 Vigas de tamaño 70
14 Vigas de tamaño 110
7 Vigas angulares de 126° 4X6
16 Vigas angulares de 90° 3X5
16 Vigas cuadradas de 5X7
4 Vigas simples de tamaño 30
4 Vigas simples de tamaño 50
Pernos, Tornillería y Decoración
29 Pernos dobles de 1.5
80 Pernos dobles de 2
45 Pernos dobles de 3
6 Pernos escalonados simples de 1
10 Pernos escalonados dobles de 1.5
14 Pernos escalonados dobles de 2
2 Decoraciones de esquina de 3X5
2 Piezas decorativas izquierdas de 3X7
2 Piezas decorativas derechas de 3X7
2 Piezas decorativas de 126°
2 Hilos de algodón encerado
4 Bandas de goma / Elásticos
¿Para qué se utilizan los 5 sensores de escala de grises?
Son el estándar en la robótica de competición. Al contar con 5 sensores independientes alineados, el robot no solo sabe si está sobre una línea negra, sino que puede calcular con precisión matemática qué tan desviado está del centro, permitiendo giros perfectos a alta velocidad en las pistas de carreras.
¿Qué significa que los motores sean de "bucle cerrado"?
Los motores tradicionales giran a ciegas según la potencia que les envías. Los motores de bucle cerrado (closed-loop)del WhalesBot 5 monitorizan constantemente su propio giro. Si una rueda patina o encuentra resistencia, el motor se autoajusta al instante para recorrer la distancia exacta configurada en el código.
¿Qué tipo de proyectos se pueden realizar con el sistema de transmisión?
¿Requiere estar conectado al ordenador para funcionar?
No. Su controlador puede almacenar más de 30 programas en su memoria interna. Los alumnos pueden programar el robot en el ordenador, descargar el código vía USB o Bluetooth y luego ejecutarlo de forma autónoma usando la pantalla LCD y los 4 botones del "cerebro", lo cual es indispensable para ponerlo a prueba en el suelo de la clase o en un torneo.
Este kit destaca por ofrecer una transición impecable entre la robótica educativa y los conceptos reales de la ingeniería industrial, combinando un hardware robusto con un entorno de software multilinguaje.
Controlador Inteligente:
Alto Rendimiento: Frecuencia de reloj de 240 MHz, con 4 MB de memoria flash y 224 KB de RAM (capaz de almacenar localmente más de 30 programas).
Interfaz de Usuario: Pantalla LCD integrada de 128×64 píxeles, 4 botones físicos programables y altavoz integrado.
Conectividad: Bluetooth integrado y 16 puertos de entrada/salida para una versatilidad de conexiones masiva.
Modos de Trabajo: Soporta modo de descarga por USB y modo de ejecución en línea (online running mode).
Ingeniería Mecánica Avanzada:
A diferencia de los kits tradicionales, este modelo incluye más de 315 piezas estructurales (de 37 tipos diferentes)enfocadas en la transmisión física:
Sistemas de Engranajes: Ruedas dentadas de 8, 16 y 24 dientes, engranajes cónicos y engranajes helicoidales.
Mecanismos Industriales: Incluye cremalleras para convertir el movimiento rotativo en lineal, permitiendo construir pinzas de agarre y elevadores realistas.
Chasis Integrado: Una estructura base ultrarresistente y estable optimizada para transformarse rápidamente en vehículos robóticos de competición.
Sensores y Actuadores de Alta Precisión:
Navegación Óptica: Equipado con 5 sensores individuales de escala de grises, ideales para algoritmos complejos de rastreo y lectura de pistas de competición.
Detección de Entorno: Incluye un sensor de obstáculos por infrarrojos y un sensor de reconocimiento de color.
Movimiento Profesional: 3 Motores de bucle cerrado (closed-loop) que miden su propia rotación para garantizar trayectorias perfectas y corregir desvíos.
Feedback: Módulo de luz de color RGB.
Especificaciones:
Alimentación: Batería de litio especial de 7,4 V y 1500 mAh (diseñada para soportar largas sesiones de pruebas en el aula sin interrupciones).
Entorno de Programación: Compatible con Scratch (bloques), C (textual), Python (profesional) y un editor de acciones intuitivo.
Valores Educativos:
Pensamiento Computacional Avanzado y Lógica Multicondición: Al programar con múltiples sensores en tiempo real (como el array de 5 sensores de escala de grises), el alumnado deja atrás las instrucciones lineales simples para adentrarse en la lógica condicional avanzada. Aprenden a estructurar algoritmos complejos donde el robot debe tomar decisiones combinando variables simultáneas (velocidad, color, obstáculos y posición).
Ingeniería Mecánica y Cinemática Aplicada: Con el sistema de transmisión avanzado (engranajes cónicos, helicoidales y cremalleras), los alumnos/as asimilan conceptos físicos y mecánicos reales. Aprenden en la práctica cómo transformar un movimiento rotatorio en uno lineal, cómo calcular relaciones de transmisión, y la diferencia crítica entre fuerza (torque) y velocidad.
Precisión y Gestión de Datos en Tiempo Real: El uso de motores de bucle cerrado (closed-loop) introduce al alumnado en el concepto industrial de sistemas de control por retroalimentación. Aprenden a interpretar los datos que el propio robot genera para corregir errores sobre la marcha, una habilidad fundamental en la ingeniería moderna y la ciencia de datos.
Transición Gradual al Código Profesional: El entorno de software de WhalesBot actúa como un puente pedagógico perfecto. Permite que el alumno comience estructurando sus ideas de forma visual con Scratch y evolucione de manera natural hacia la sintaxis real y el código de texto con Python y C, preparándolos para entornos académicos y laborales reales.
Resolución de Problemas y Resiliencia en Competición: Diseñado con el estándar de torneos como ENJOY AI, este kit fomenta el pensamiento divergente y el trabajo en equipo bajo escenarios de desafío. Los y las estudiantes aprenden a iterar, probar, fallar y recalibrar sus modelos de forma autónoma, fortaleciendo la confianza en sus propias habilidades técnicas.
1 Controlador
1 Sensor ultrasónico
1 Sensor de color
1 Sensor de temperatura y humedad
1 Codificador rotatorio
1 Sensor de gestos
1 Sensor táctil
5 Sensores de escala de grises para el suelo
2 Pantallas de matriz de puntos
2 Luces LED RGB
4 Motores de circuito cerrado
13 Cables de conexión de 6 pines
1 Cable de datos Tipo C
1 Batería
1 Adaptador de corriente
Componentes Estructurales
Engranajes, Mecanismos y Ruedas
4 Engranajes de 8 dientes rectos
4 Engranajes de 16 dientes rectos
4 Engranajes de 24 dientes rectos
8 Engranajes cónicos de 12 dientes de media altura
4 Engranajes cónicos de 20 dientes de media altura
4 Engranajes de cono de 12 dientes
4 Engranajes de cono de 20 dientes
2 Engranajes de cono de 36 dientes
8 Cremalleras con agujeros para vigas
2 Engranajes helicoidales / Sinfín
2 Neumáticos tipo 6018
1 Rueda universal / Loca
4 Bujes / Ejes de transmisión
4 Neumáticos de tracción
4 Ruedas de cadena
60 Orugas / Eslabones de cadena
4 Neumáticos para polea
4 Poleas
Ejes, Conectores y Soporte
20 Manguitos para semiejes de polea de 0.5
10 Manguitos para ejes
3 Soportes de transferencia para motor
1 Chasis general
5 Ejes de tamaño 30
5 Ejes de tamaño 40
6 Ejes de tamaño 50
4 Ejes de tamaño 60
8 Ejes de tamaño 80
2 Ejes de tamaño 100
2 Acoplamientos universales / Cardán
4 Acopladores de 20
4 Acopladores de 90°
3 Acopladores de 112.5°
3 Acopladores de 157.5°
Vigas Estructurales
4 Vigas en forma de U
8 Vigas de tamaño 20
18 Vigas de tamaño 30
15 Vigas de tamaño 50
13 Vigas de tamaño 70
14 Vigas de tamaño 110
7 Vigas angulares de 126° 4X6
16 Vigas angulares de 90° 3X5
16 Vigas cuadradas de 5X7
4 Vigas simples de tamaño 30
4 Vigas simples de tamaño 50
Pernos, Tornillería y Decoración
29 Pernos dobles de 1.5
80 Pernos dobles de 2
45 Pernos dobles de 3
6 Pernos escalonados simples de 1
10 Pernos escalonados dobles de 1.5
14 Pernos escalonados dobles de 2
2 Decoraciones de esquina de 3X5
2 Piezas decorativas izquierdas de 3X7
2 Piezas decorativas derechas de 3X7
2 Piezas decorativas de 126°
2 Hilos de algodón encerado
4 Bandas de goma / Elásticos
¿Para qué se utilizan los 5 sensores de escala de grises?
Son el estándar en la robótica de competición. Al contar con 5 sensores independientes alineados, el robot no solo sabe si está sobre una línea negra, sino que puede calcular con precisión matemática qué tan desviado está del centro, permitiendo giros perfectos a alta velocidad en las pistas de carreras.
¿Qué significa que los motores sean de "bucle cerrado"?
Los motores tradicionales giran a ciegas según la potencia que les envías. Los motores de bucle cerrado (closed-loop)del WhalesBot 5 monitorizan constantemente su propio giro. Si una rueda patina o encuentra resistencia, el motor se autoajusta al instante para recorrer la distancia exacta configurada en el código.
¿Qué tipo de proyectos se pueden realizar con el sistema de transmisión?
¿Requiere estar conectado al ordenador para funcionar?
No. Su controlador puede almacenar más de 30 programas en su memoria interna. Los alumnos pueden programar el robot en el ordenador, descargar el código vía USB o Bluetooth y luego ejecutarlo de forma autónoma usando la pantalla LCD y los 4 botones del "cerebro", lo cual es indispensable para ponerlo a prueba en el suelo de la clase o en un torneo.
Contacta con nosotros
¿Tienes dudas o quieres que te ayudemos a elegir el mejor producto para tus alumnos?
Te ayudamos